Plasticity of von Mises (Numba)#
This tutorial aims to demonstrate an efficient implementation of the plasticity
model of von Mises using an external operator defining the elastoplastic
constitutive relations written with the help of the 3rd-party package Numba.
Here we consider a cylinder expansion problem in the two-dimensional case in a
symmetric formulation.
This tutorial is based on the original implementation of the problem via legacy FEniCS 2019 and its extension for the modern FEniCSx in the setting of convex optimization. A detailed conclusion of the von Mises plastic model in the case of the cylinder expansion problem can be found in [Bonnet et al., 2014]. Do not hesitate to visit the mentioned sources for more information.
We assume the knowledge of the return-mapping procedure, commonly used in the solid mechanics community to solve elastoplasticity problems.
Notation#
Denoting the displacement vector \(\boldsymbol{u}\) we define the strain tensor \(\boldsymbol{\varepsilon}\) as follows
Throughout the tutorial, we stick to the Mandel-Voigt notation, according to which the stress tensor \(\boldsymbol{\sigma}\) and the strain tensor \(\boldsymbol{\varepsilon}\) are written as 4-size vectors with the following components
Denoting the deviatoric operator \(\mathrm{dev}\), we introduce two additional quantities of interest: the cumulative plastic strain \(p\) and the equivalent stress \(\sigma_\text{eq}\) defined by the following formulas:
where \(\boldsymbol{e} = \mathrm{dev}\boldsymbol{\varepsilon}\) and \(\boldsymbol{s} = \mathrm{dev}\boldsymbol{\sigma}\) are deviatoric parts of the stain and stress tensors respectively.
Problem formulation#
The domain of the problem \(\Omega\) represents the first quarter of the hollow cylinder with inner \(R_i\) and outer \(R_o\) radii, where symmetry conditions are set on the left and bottom sides and pressure is set on the inner wall \(\partial\Omega_\text{inner}\). The behaviour of cylinder material is defined by the von Mises yield criterion \(f\) with the linear isotropic hardening law (3)
where \(\sigma_0\) is a uniaxial strength and \(H\) is an isotropic hardening modulus, which is defined through the Young modulus \(E\) and the tangent elastic modulus \(E_t = \frac{EH}{E+H}\).
Let V be the functional space of admissible displacement fields. Then, the weak formulation of this problem can be written as follows:
Find \(\boldsymbol{u} \in V\) such that
The external force \(F_{\text{ext}}(\boldsymbol{v})\) represents the pressure inside the cylinder and is written as the following Neumann condition
where the vector \(\boldsymbol{n}\) is the outward normal to the cylinder surface and the loading parameter \(q\) is progressively adjusted from 0 to \(q_\text{lim} = \frac{2}{\sqrt{3}}\sigma_0\log\left(\frac{R_o}{R_i}\right)\), the analytical collapse load for the perfect plasticity model without hardening.
The modelling is performed under assumptions of the plane strain and an associative plasticity law.
In this tutorial, we treat the stress tensor \(\boldsymbol{\sigma}\) as an
external operator acting on the strain tensor
\(\boldsymbol{\varepsilon}(\boldsymbol{u})\) and represent it through a
FEMExternalOperator object. By the implementation of this external operator,
we mean an implementation of the return-mapping procedure, the most common
approach to solve plasticity problems. With the help of this procedure, we
compute both values of the stress tensor \(\boldsymbol{\sigma}\) and its
derivative, so-called the tangent moduli \(\boldsymbol{C}_\text{tang}\).
As before, in order to solve the nonlinear equation (4) we need to compute the Gateaux derivative of \(F\) in the direction \(\boldsymbol{\hat{u}} \in V\):
The advantage of the von Mises model is that the return-mapping procedure may be performed analytically, so the stress tensor and the tangent moduli may be expressed explicitly using any package. In our case, we the Numba library to define the behaviour of the external operator and its derivative.
Implementation#
Preamble#
from collections.abc import Callable, Sequence
from functools import partial
from mpi4py import MPI
from petsc4py import PETSc
import matplotlib.pyplot as plt
import numba
import numpy as np
from demo_plasticity_von_mises_pure_ufl import plasticity_von_mises_pure_ufl
from utilities import build_cylinder_quarter, find_cell_by_point
import basix
import ufl
from dolfinx import fem
from dolfinx.fem.bcs import DirichletBC
from dolfinx.fem.forms import Form
from dolfinx.fem.function import Function
from dolfinx.fem.petsc import NonlinearProblem, apply_lifting, assemble_vector, set_bc
from dolfinx_external_operator import (
FEMExternalOperator,
evaluate_external_operators,
evaluate_operands,
replace_external_operators,
)
Here we define geometrical and material parameters of the problem as well as some useful constants.
R_e, R_i = 1.3, 1.0 # external/internal radius
E, nu = 70e3, 0.3 # elastic parameters
E_tangent = E / 100.0 # tangent modulus
H = E * E_tangent / (E - E_tangent) # hardening modulus
sigma_0 = 250.0 # yield strength
lmbda = E * nu / (1.0 + nu) / (1.0 - 2.0 * nu)
mu = E / 2.0 / (1.0 + nu)
# stiffness matrix
C_elas = np.array(
[
[lmbda + 2.0 * mu, lmbda, lmbda, 0.0],
[lmbda, lmbda + 2.0 * mu, lmbda, 0.0],
[lmbda, lmbda, lmbda + 2.0 * mu, 0.0],
[0.0, 0.0, 0.0, 2.0 * mu],
],
dtype=PETSc.ScalarType,
)
deviatoric = np.eye(4, dtype=PETSc.ScalarType)
deviatoric[:3, :3] -= np.full((3, 3), 1.0 / 3.0, dtype=PETSc.ScalarType)
mesh, facet_tags, facet_tags_labels = build_cylinder_quarter()
k_u = 2
V = fem.functionspace(mesh, ("Lagrange", k_u, (mesh.geometry.dim,)))
# Boundary conditions
bottom_facets = facet_tags.find(facet_tags_labels["Lx"])
left_facets = facet_tags.find(facet_tags_labels["Ly"])
bottom_dofs_y = fem.locate_dofs_topological(V.sub(1), mesh.topology.dim - 1, bottom_facets)
left_dofs_x = fem.locate_dofs_topological(V.sub(0), mesh.topology.dim - 1, left_facets)
sym_bottom = fem.dirichletbc(np.array(0.0, dtype=PETSc.ScalarType), bottom_dofs_y, V.sub(1))
sym_left = fem.dirichletbc(np.array(0.0, dtype=PETSc.ScalarType), left_dofs_x, V.sub(0))
bcs = [sym_bottom, sym_left]
def epsilon(v):
grad_v = ufl.grad(v)
return ufl.as_vector([grad_v[0, 0], grad_v[1, 1], 0, np.sqrt(2.0) * 0.5 * (grad_v[0, 1] + grad_v[1, 0])])
k_stress = 2 * (k_u - 1)
ds = ufl.Measure(
"ds",
domain=mesh,
subdomain_data=facet_tags,
metadata={"quadrature_degree": k_stress, "quadrature_scheme": "default"},
)
dx = ufl.Measure(
"dx",
domain=mesh,
metadata={"quadrature_degree": k_stress, "quadrature_scheme": "default"},
)
Du = fem.Function(V, name="displacement_increment")
S_element = basix.ufl.quadrature_element(mesh.topology.cell_name(), degree=k_stress, value_shape=(4,))
S = fem.functionspace(mesh, S_element)
sigma = FEMExternalOperator(epsilon(Du), function_space=S)
n = ufl.FacetNormal(mesh)
loading = fem.Constant(mesh, PETSc.ScalarType(0.0))
v = ufl.TestFunction(V)
F = ufl.inner(sigma, epsilon(v)) * dx - ufl.inner(loading * -n, v) * ds(facet_tags_labels["inner"])
# Internal state
P_element = basix.ufl.quadrature_element(mesh.topology.cell_name(), degree=k_stress)
P = fem.functionspace(mesh, P_element)
p = fem.Function(P, name="cumulative_plastic_strain")
dp = fem.Function(P, name="incremental_plastic_strain")
sigma_n = fem.Function(S, name="stress_n")
Defining the external operator#
During the automatic differentiation of the form \(F\), the following terms will appear in the Jacobian
where the “trial” part \(\boldsymbol{\varepsilon}(\boldsymbol{\hat{u}})\) will be handled by the framework and the derivative of the operator \(\frac{\mathrm{d} \boldsymbol{\sigma}}{\mathrm{d} \boldsymbol{\varepsilon}}\) must be implemented by the user. In this tutorial, we implement the derivative using the Numba package.
First of all, we implement the return-mapping procedure locally in the
function _kernel. It computes the values of the stress tensor, the tangent
moduli and the increment of cumulative plastic strain at a single Gausse
node. For more details, visit the original
implementation
of this problem for the legacy FEniCS 2019.
Then we iterate over each Gauss node and compute the quantities of interest
globally in the return_mapping function with the @numba.njit decorator.
This guarantees that the function will be compiled during its first call and
ordinary for-loops will be efficiently processed.
num_quadrature_points = P_element.dim
@numba.njit
def return_mapping(deps_, sigma_n_, p_):
"""Performs the return-mapping procedure."""
num_cells = deps_.shape[0]
C_tang_ = np.empty((num_cells, num_quadrature_points, 4, 4), dtype=PETSc.ScalarType)
sigma_ = np.empty_like(sigma_n_)
dp_ = np.empty_like(p_)
def _kernel(deps_local, sigma_n_local, p_local):
"""Performs the return-mapping procedure locally."""
sigma_elastic = sigma_n_local + C_elas @ deps_local
s = deviatoric @ sigma_elastic
sigma_eq = np.sqrt(3.0 / 2.0 * np.dot(s, s))
f_elastic = sigma_eq - sigma_0 - H * p_local
f_elastic_plus = (f_elastic + np.sqrt(f_elastic**2)) / 2.0
dp = f_elastic_plus / (3 * mu + H)
n_elas = s / sigma_eq * f_elastic_plus / f_elastic
beta = 3 * mu * dp / sigma_eq
sigma = sigma_elastic - beta * s
n_elas_matrix = np.outer(n_elas, n_elas)
C_tang = C_elas - 3 * mu * (3 * mu / (3 * mu + H) - beta) * n_elas_matrix - 2 * mu * beta * deviatoric
return C_tang, sigma, dp
for i in range(0, num_cells):
for j in range(0, num_quadrature_points):
C_tang_[i, j], sigma_[i, j], dp_[i, j] = _kernel(deps_[i, j], sigma_n_[i, j], p_[i, j])
return C_tang_, sigma_, dp_
Now nothing stops us from defining the implementation of the external operator
derivative (the tangent tensor \(\boldsymbol{C}_\text{tang}\)) in the
function C_tang_impl. It returns global values of the derivative, stress
tensor and the cumulative plastic increment.
def C_tang_impl(deps):
num_cells, num_quadrature_points, _ = deps.shape
deps_ = deps.reshape((num_cells, num_quadrature_points, 4))
sigma_n_ = sigma_n.x.array.reshape((num_cells, num_quadrature_points, 4))
p_ = p.x.array.reshape((num_cells, num_quadrature_points))
C_tang_, sigma_, dp_ = return_mapping(deps_, sigma_n_, p_)
return C_tang_.reshape(-1), sigma_.reshape(-1), dp_.reshape(-1)
It is worth noting that at the time of the derivative evaluation, we compute the
values of the external operator as well. Thus, there is no need for a separate
implementation of the operator \(\boldsymbol{\sigma}\). We will reuse the output
of the C_tang_impl to update values of the external operator further in the
Newton loop.
def sigma_external(derivatives):
if derivatives == (1,):
return C_tang_impl
else:
raise NotImplementedError(f"No external function is defined for the requested derivative {derivatives}.")
sigma.external_function = sigma_external
Note
The framework allows implementations of external operators and its derivatives
to return additional outputs. In our example, alongside with the values of the
derivative, the function C_tang_impl returns, the values of the stress tensor
and the cumulative plastic increment. Both additional outputs may be reused by
the user afterwards in the Newton loop.
Form manipulations#
As in the previous tutorials before solving the problem we need to perform some transformation of both linear and bilinear forms.
u_hat = ufl.TrialFunction(V)
J = ufl.derivative(F, Du, u_hat)
F_replaced, F_external_operators = replace_external_operators(F)
J_replaced, J_external_operators = replace_external_operators(J)
F_form = fem.form(F_replaced)
J_form = fem.form(J_replaced)
Note
We remind that in the code above we replace FEMExternalOperator objects by
their fem.Function representatives, the coefficients which are allocated
during the call of the FEMExternalOperator constructor. The access to these
coefficients may be carried out through the field ref_coefficient of an
FEMExternalOperator object. For example, the following code returns the
finite coefficient associated with the tangent matrix
C_tang = J_external_operators[0].ref_coefficient.
Solving the problem#
Once we prepared the forms containing external operators, we can apply the
Newton method to solve the nonlinear problem that is based on that forms. For
this matter, we use NonlinearProblem, which is a high-level interface of
DOLFINx based on PETSc SNES.
petsc_options = {
"snes_type": "vinewtonrsls",
"snes_linesearch_type": "basic",
"ksp_type": "preonly",
"pc_type": "lu",
"snes_atol": 1.0e-8,
"snes_rtol": 1.0e-8,
"snes_max_it": 100,
"snes_monitor": "",
}
problem = NonlinearProblem(
F_replaced, Du, J=J_replaced, bcs=bcs, petsc_options_prefix="demo_von_mises_", petsc_options=petsc_options
)
To update external operators at each iteration of the Newton method, we provide
SNES of problem with the function constitutive_update that evaluates
external operators and updates the internal variable dp.
def constitutive_update(
F_external_operators: list[FEMExternalOperator], J_external_operators: list[FEMExternalOperator], dp: Function
):
"""Update the constitutive model by evaluating the external operators."""
evaluated_operands = evaluate_operands(F_external_operators)
# Call `C_tang_impl` that returns additional arrays `sigma_new` and `dp_new`
((_, sigma_new, dp_new),) = evaluate_external_operators(J_external_operators, evaluated_operands)
# Update external operator `sigma` via explicit copy
sigma = F_external_operators[0]
sigma.ref_coefficient.x.array[:] = sigma_new
# Update history variable
dp.x.array[:] = dp_new
def assemble_residual_with_callback(
u: Function,
F: Form,
J: Form,
bcs: Sequence[DirichletBC],
external_callback: Callable,
args_external_callback: Sequence,
snes: PETSc.SNES,
x: PETSc.Vec,
b: PETSc.Vec,
) -> None:
"""Assemble the residual at ``x`` into the vector ``b`` with a callback to
external functions.
Prior to assembling the residual and after updating the solution ``u``, the
function ``external_callback`` with input arguments ``args_external_callback``
is called.
A function conforming to the interface expected by ``SNES.setFunction`` can
be created by fixing the first 5 arguments, e.g. (cf.
``dolfinx.fem.petsc.assemble_residual``):
Example::
snes = PETSc.SNES().create(mesh.comm)
assemble_residual = functools.partial(
dolfinx.fem.petsc.assemble_residual, u, F, J, bcs,
external_callback, args_external_callback)
snes.setFunction(assemble_residual, b)
Args:
u: Function tied to the solution vector within the residual and
Jacobian.
F: Form of the residual.
J: Form of the Jacobian.
bcs: List of Dirichlet boundary conditions to lift the residual.
external_callback: A callback function to call prior to assembling the
residual.
args_external_callback: Arguments to pass to the external callback
function.
snes: The solver instance.
x: The vector containing the point to evaluate the residual at.
b: Vector to assemble the residual into.
"""
x.ghostUpdate(addv=PETSc.InsertMode.INSERT, mode=PETSc.ScatterMode.FORWARD)
x.copy(u.x.petsc_vec)
u.x.scatter_forward()
# Call external functions, e.g. evaluation of external operators
external_callback(*args_external_callback)
with b.localForm() as b_local:
b_local.set(0.0)
assemble_vector(b, F)
apply_lifting(b, [J], [bcs], [x], -1.0)
b.ghostUpdate(addv=PETSc.InsertMode.ADD, mode=PETSc.ScatterMode.REVERSE)
set_bc(b, bcs, x, -1.0)
assemble_residual_with_callback_ = partial(
assemble_residual_with_callback,
problem.u,
problem.F,
problem.J,
bcs,
constitutive_update, # external callback with respect to SNES
[F_external_operators, J_external_operators, dp], # input arguments of the callback
)
# Set the custom residual assembly function with the one that calls
# `constitutive_update`
problem.solver.setFunction(assemble_residual_with_callback_, problem.b)
Now we are ready to solve the problem.
u = fem.Function(V, name="displacement")
x_point = np.array([[R_i, 0, 0]])
cells, points_on_process = find_cell_by_point(mesh, x_point)
q_lim = 2.0 / np.sqrt(3.0) * np.log(R_e / R_i) * sigma_0
num_increments = 20
load_steps = np.linspace(0, 1.1, num_increments, endpoint=True) ** 0.5
loadings = q_lim * load_steps
results = np.zeros((num_increments, 2))
eps = np.finfo(PETSc.ScalarType).eps
for i, loading_v in enumerate(loadings):
if MPI.COMM_WORLD.rank == 0:
print(f"Load increment #{i}, load: {loading_v:.3f}")
loading.value = loading_v
Du.x.array[:] = eps
_ = problem.solve()
iters = problem.solver.getIterationNumber()
print(f"\tInner Newton iterations: {iters}")
u.x.petsc_vec.axpy(1.0, Du.x.petsc_vec)
u.x.scatter_forward()
p.x.petsc_vec.axpy(1.0, dp.x.petsc_vec)
sigma_n.x.array[:] = sigma.ref_coefficient.x.array
if len(points_on_process) > 0:
results[i, :] = (u.eval(points_on_process, cells)[0], loading.value / q_lim)
Load increment #0, load: 0.000
0 SNES Function norm 9.735974110732e-11
Inner Newton iterations: 0
Load increment #1, load: 18.224
0 SNES Function norm 8.599242028004e+00
1 SNES Function norm 3.165890211455e-13
Inner Newton iterations: 1
Load increment #2, load: 25.772
0 SNES Function norm 3.561922674129e+00
1 SNES Function norm 1.357157411047e-13
Inner Newton iterations: 1
Load increment #3, load: 31.564
0 SNES Function norm 2.733159396954e+00
1 SNES Function norm 1.072933445785e-13
Inner Newton iterations: 1
Load increment #4, load: 36.447
0 SNES Function norm 2.304159956925e+00
1 SNES Function norm 8.826606400958e-14
Inner Newton iterations: 1
Load increment #5, load: 40.749
0 SNES Function norm 2.030005673584e+00
1 SNES Function norm 8.760862482722e-14
Inner Newton iterations: 1
Load increment #6, load: 44.638
0 SNES Function norm 1.835265413718e+00
1 SNES Function norm 7.675857001799e-14
Inner Newton iterations: 1
Load increment #7, load: 48.215
0 SNES Function norm 1.687700726449e+00
1 SNES Function norm 7.036021926694e-14
Inner Newton iterations: 1
Load increment #8, load: 51.544
0 SNES Function norm 1.570873534513e+00
1 SNES Function norm 7.364204850506e-14
Inner Newton iterations: 1
Load increment #9, load: 54.671
0 SNES Function norm 1.475396679750e+00
1 SNES Function norm 7.073939373632e-14
Inner Newton iterations: 1
Load increment #10, load: 57.628
0 SNES Function norm 1.395464875528e+00
1 SNES Function norm 6.564541668812e-14
Inner Newton iterations: 1
Load increment #11, load: 60.441
0 SNES Function norm 1.327268328808e+00
1 SNES Function norm 5.538226865341e-14
Inner Newton iterations: 1
Load increment #12, load: 63.128
0 SNES Function norm 1.268188909827e+00
1 SNES Function norm 1.489301007183e+00
2 SNES Function norm 2.401127969078e-02
3 SNES Function norm 3.059447962573e-06
4 SNES Function norm 8.495063478328e-14
Inner Newton iterations: 4
Load increment #13, load: 65.706
0 SNES Function norm 1.216359863927e+00
1 SNES Function norm 1.864429452635e+00
2 SNES Function norm 1.849648275577e-02
3 SNES Function norm 1.728901268485e-06
4 SNES Function norm 6.256848959742e-14
Inner Newton iterations: 4
Load increment #14, load: 68.186
0 SNES Function norm 1.170409392647e+00
1 SNES Function norm 2.904530387837e+00
2 SNES Function norm 5.874399460844e-02
3 SNES Function norm 6.654806154631e-05
4 SNES Function norm 2.104061853646e-10
Inner Newton iterations: 4
Load increment #15, load: 70.580
0 SNES Function norm 1.129303709772e+00
1 SNES Function norm 2.706931012242e+00
2 SNES Function norm 1.412797504674e-01
3 SNES Function norm 2.522387752053e-03
4 SNES Function norm 4.993407400421e-07
5 SNES Function norm 7.657440001862e-14
Inner Newton iterations: 5
Load increment #16, load: 72.894
0 SNES Function norm 1.092246947552e+00
1 SNES Function norm 1.479909211759e+00
2 SNES Function norm 3.240106152237e-01
3 SNES Function norm 1.627286033445e-02
4 SNES Function norm 1.521056575447e-05
5 SNES Function norm 1.630985707841e-11
Inner Newton iterations: 5
Load increment #17, load: 75.138
0 SNES Function norm 1.058615069702e+00
Inner Newton iterations: 0
Load increment #18, load: 77.316
Inner Newton iterations: 0
Load increment #19, load: 79.435
Inner Newton iterations: 0
Post-processing#
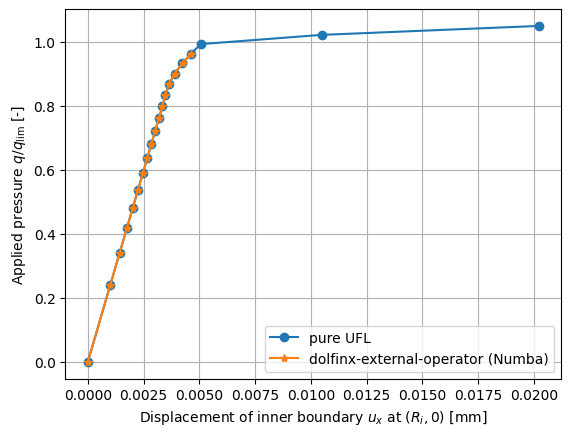
In order to verify the correctness of obtained results, we perform their
comparison against a “pure UFl” implementation. Thanks to simplicity of the von
Mises model we can express stress tensor and tangent moduli analytically within
the variational setting and so in UFL. Such a performant implementation is
presented by the function plasticity_von_mises_pure_ufl.
results_pure_ufl = plasticity_von_mises_pure_ufl(verbose=True)
Load increment #0, load: 18.224
0 SNES Function norm 8.599242028001e+00
1 SNES Function norm 3.707763086477e-13
Inner Newton iterations: 1
Load increment #1, load: 25.772
0 SNES Function norm 5.037319353875e+00
1 SNES Function norm 2.173179644185e-13
Inner Newton iterations: 1
Load increment #2, load: 31.564
0 SNES Function norm 8.287632771751e-01
1 SNES Function norm 6.160304246034e-14
Inner Newton iterations: 1
Load increment #3, load: 36.447
0 SNES Function norm 4.289994400290e-01
1 SNES Function norm 6.039495744435e-14
Inner Newton iterations: 1
Load increment #4, load: 40.749
0 SNES Function norm 2.741542833413e-01
1 SNES Function norm 4.666375712008e-14
Inner Newton iterations: 1
Load increment #5, load: 44.638
0 SNES Function norm 1.947402598663e-01
1 SNES Function norm 4.251745451590e-14
Inner Newton iterations: 1
Load increment #6, load: 48.215
0 SNES Function norm 1.475646872682e-01
1 SNES Function norm 3.761036553781e-14
Inner Newton iterations: 1
Load increment #7, load: 51.544
0 SNES Function norm 1.168271919368e-01
1 SNES Function norm 5.622850203615e-14
Inner Newton iterations: 1
Load increment #8, load: 54.671
0 SNES Function norm 9.547685476257e-02
1 SNES Function norm 4.833305264468e-14
Inner Newton iterations: 1
Load increment #9, load: 57.628
0 SNES Function norm 7.993180422194e-02
1 SNES Function norm 4.922986199823e-14
Inner Newton iterations: 1
Load increment #10, load: 60.441
0 SNES Function norm 6.819654672002e-02
1 SNES Function norm 4.812206568573e-14
Inner Newton iterations: 1
Load increment #11, load: 63.128
0 SNES Function norm 1.543311382782e+00
1 SNES Function norm 2.268979604869e-02
2 SNES Function norm 2.757984919757e-06
3 SNES Function norm 7.433019229862e-14
Inner Newton iterations: 3
Load increment #12, load: 65.706
0 SNES Function norm 1.038273203056e+00
1 SNES Function norm 1.006639718546e-01
2 SNES Function norm 1.443589632202e-05
3 SNES Function norm 9.590114238792e-13
Inner Newton iterations: 3
Load increment #13, load: 68.186
0 SNES Function norm 2.135088592677e+00
1 SNES Function norm 2.801707974058e-02
2 SNES Function norm 7.704334123909e-06
3 SNES Function norm 1.241787364227e-12
Inner Newton iterations: 3
Load increment #14, load: 70.580
0 SNES Function norm 2.189846156364e+00
1 SNES Function norm 4.326554644411e-02
2 SNES Function norm 4.164752626486e-05
3 SNES Function norm 7.218767329932e-11
Inner Newton iterations: 3
Load increment #15, load: 72.894
0 SNES Function norm 1.989247993122e+00
1 SNES Function norm 2.999837010408e-02
2 SNES Function norm 2.418579146815e-05
3 SNES Function norm 2.069597968236e-11
Inner Newton iterations: 3
Load increment #16, load: 75.138
0 SNES Function norm 2.168612764046e+00
1 SNES Function norm 5.332317489711e-02
2 SNES Function norm 5.635404365384e-05
3 SNES Function norm 2.010954001056e-10
Inner Newton iterations: 3
Load increment #17, load: 77.316
0 SNES Function norm 5.624365630304e+00
1 SNES Function norm 4.164736040335e+00
2 SNES Function norm 5.705502335825e-01
3 SNES Function norm 6.137244286188e-03
4 SNES Function norm 6.918232637881e-07
5 SNES Function norm 6.190699324132e-13
Inner Newton iterations: 5
Load increment #18, load: 79.435
0 SNES Function norm 6.050025604365e+00
1 SNES Function norm 6.598086373582e-01
2 SNES Function norm 2.425716665943e-03
3 SNES Function norm 8.195869356106e-08
4 SNES Function norm 1.057995509210e-12
Inner Newton iterations: 4
Here below we plot the displacement of the inner boundary of the cylinder \(u_x(R_i, 0)\) with respect to the applied pressure in the von Mises model with isotropic hardening. The plastic deformations are reached at the pressure \(q_{\lim}\) equal to the analytical collapse load for perfect plasticity.
if len(points_on_process) > 0:
plt.plot(results_pure_ufl[:, 0], results_pure_ufl[:, 1], "o-", label="pure UFL")
plt.plot(results[:, 0], results[:, 1], "*-", label="dolfinx-external-operator (Numba)")
plt.xlabel(r"Displacement of inner boundary $u_x$ at $(R_i, 0)$ [mm]")
plt.ylabel(r"Applied pressure $q/q_{\text{lim}}$ [-]")
plt.legend()
plt.grid()
plt.savefig("output.png")
plt.show()
References#
Marc Bonnet, Attilio Frangi, and Christian Rey. The finite element method in solid mechanics. McGraw Hill Education, 2014. URL: https://hal.science/hal-01083772.