Plasticity of von Mises#
This tutorial aims to demonstrate an efficient implementation of the plasticity
model of von Mises using an external operator defining the elastoplastic
constitutive relations written with the help of the 3rd-party package Numba.
Here we consider a cylinder expansion problem in the two-dimensional case in a
symmetric formulation.
This tutorial is based on the original implementation of the problem via legacy FEniCS 2019 and its extension for the modern FEniCSx in the setting of convex optimization. A detailed conclusion of the von Mises plastic model in the case of the cylinder expansion problem can be found in [Bonnet et al., 2014]. Do not hesitate to visit the mentioned sources for more information.
We assume the knowledge of the return-mapping procedure, commonly used in the solid mechanics community to solve elastoplasticity problems.
Notation#
Denoting the displacement vector \(\boldsymbol{u}\) we define the strain tensor \(\boldsymbol{\varepsilon}\) as follows
Throughout the tutorial, we stick to the Mandel-Voigt notation, according to which the stress tensor \(\boldsymbol{\sigma}\) and the strain tensor \(\boldsymbol{\varepsilon}\) are written as 4-size vectors with the following components
Denoting the deviatoric operator \(\mathrm{dev}\), we introduce two additional quantities of interest: the cumulative plastic strain \(p\) and the equivalent stress \(\sigma_\text{eq}\) defined by the following formulas:
where \(\boldsymbol{e} = \mathrm{dev}\boldsymbol{\varepsilon}\) and \(\boldsymbol{s} = \mathrm{dev}\boldsymbol{\sigma}\) are deviatoric parts of the stain and stress tensors respectively.
Problem formulation#
The domain of the problem \(\Omega\) represents the first quarter of the hollow cylinder with inner \(R_i\) and outer \(R_o\) radii, where symmetry conditions are set on the left and bottom sides and pressure is set on the inner wall \(\partial\Omega_\text{inner}\). The behaviour of cylinder material is defined by the von Mises yield criterion \(f\) with the linear isotropic hardening law (3)
where \(\sigma_0\) is a uniaxial strength and \(H\) is an isotropic hardening modulus, which is defined through the Young modulus \(E\) and the tangent elastic modulus \(E_t = \frac{EH}{E+H}\).
Let V be the functional space of admissible displacement fields. Then, the weak formulation of this problem can be written as follows:
Find \(\boldsymbol{u} \in V\) such that
The external force \(F_{\text{ext}}(\boldsymbol{v})\) represents the pressure inside the cylinder and is written as the following Neumann condition
where the vector \(\boldsymbol{n}\) is a normal to the cylinder surface and the loading parameter \(q\) is progressively increased from 0 to \(q_\text{lim} = \frac{2}{\sqrt{3}}\sigma_0\log\left(\frac{R_o}{R_i}\right)\), the analytical collapse load for the perfect plasticity model without hardening.
The modelling is performed under assumptions of the plane strain and an associative plasticity law.
In this tutorial, we treat the stress tensor \(\boldsymbol{\sigma}\) as an
external operator acting on the strain tensor \(\boldsymbol{\varepsilon}(\boldsymbol{u})\) and
represent it through a FEMExternalOperator object. By the implementation of
this external operator, we mean an implementation of the return-mapping
procedure, the most common approach to solve plasticity problems. With the
help of this procedure, we compute both values of the stress tensor
\(\boldsymbol{\sigma}\) and its derivative, so-called the tangent stiffness
matrix \(\boldsymbol{C}_\text{tang}\).
As before, in order to solve the nonlinear equation (4) we need to compute the Gateaux derivative of \(F\) in the direction \(\boldsymbol{\hat{u}} \in V\):
The advantage of the von Mises model is that the return-mapping procedure may be performed analytically, so the stress tensor and the tangent stiffness matrix may be expressed explicitly using any package. In our case, we the Numba library to define the behaviour of the external operator and its derivative.
Implementation#
Preamble#
from mpi4py import MPI
from petsc4py import PETSc
import matplotlib.pyplot as plt
import numba
import numpy as np
from plasticity_von_mises_pure_ufl import plasticity_von_mises_interpolation, plasticity_von_mises_pure_ufl
from solvers import LinearProblem
from utilities import build_cylinder_quarter, find_cell_by_point
import basix
import ufl
from dolfinx import common, fem
from dolfinx_external_operator import (
FEMExternalOperator,
evaluate_external_operators,
evaluate_operands,
replace_external_operators,
)
Here we define geometrical and material parameters of the problem as well as some useful constants.
R_e, R_i = 1.3, 1.0 # external/internal radius
E, nu = 70e3, 0.3 # elastic parameters
E_tangent = E / 100.0 # tangent modulus
H = E * E_tangent / (E - E_tangent) # hardening modulus
sigma_0 = 250.0 # yield strength
lmbda = E * nu / (1.0 + nu) / (1.0 - 2.0 * nu)
mu = E / 2.0 / (1.0 + nu)
# stiffness matrix
C_elas = np.array(
[
[lmbda + 2.0 * mu, lmbda, lmbda, 0.0],
[lmbda, lmbda + 2.0 * mu, lmbda, 0.0],
[lmbda, lmbda, lmbda + 2.0 * mu, 0.0],
[0.0, 0.0, 0.0, 2.0 * mu],
],
dtype=PETSc.ScalarType,
)
deviatoric = np.eye(4, dtype=PETSc.ScalarType)
deviatoric[:3, :3] -= np.full((3, 3), 1.0 / 3.0, dtype=PETSc.ScalarType)
mesh, facet_tags, facet_tags_labels = build_cylinder_quarter()
k_u = 2
V = fem.functionspace(mesh, ("Lagrange", k_u, (2,)))
# Boundary conditions
bottom_facets = facet_tags.find(facet_tags_labels["Lx"])
left_facets = facet_tags.find(facet_tags_labels["Ly"])
bottom_dofs_y = fem.locate_dofs_topological(V.sub(1), mesh.topology.dim - 1, bottom_facets)
left_dofs_x = fem.locate_dofs_topological(V.sub(0), mesh.topology.dim - 1, left_facets)
sym_bottom = fem.dirichletbc(np.array(0.0, dtype=PETSc.ScalarType), bottom_dofs_y, V.sub(1))
sym_left = fem.dirichletbc(np.array(0.0, dtype=PETSc.ScalarType), left_dofs_x, V.sub(0))
bcs = [sym_bottom, sym_left]
def epsilon(v):
grad_v = ufl.grad(v)
return ufl.as_vector([grad_v[0, 0], grad_v[1, 1], 0, np.sqrt(2.0) * 0.5 * (grad_v[0, 1] + grad_v[1, 0])])
k_stress = 2 * (k_u - 1)
ds = ufl.Measure(
"ds",
domain=mesh,
subdomain_data=facet_tags,
metadata={"quadrature_degree": k_stress, "quadrature_scheme": "default"},
)
dx = ufl.Measure(
"dx",
domain=mesh,
metadata={"quadrature_degree": k_stress, "quadrature_scheme": "default"},
)
Du = fem.Function(V, name="displacement_increment")
S_element = basix.ufl.quadrature_element(mesh.topology.cell_name(), degree=k_stress, value_shape=(4,))
S = fem.functionspace(mesh, S_element)
sigma = FEMExternalOperator(epsilon(Du), function_space=S)
n = ufl.FacetNormal(mesh)
loading = fem.Constant(mesh, PETSc.ScalarType(0.0))
v = ufl.TestFunction(V)
F = ufl.inner(sigma, epsilon(v)) * dx - loading * ufl.inner(v, n) * ds(facet_tags_labels["inner"])
# Internal state
P_element = basix.ufl.quadrature_element(mesh.topology.cell_name(), degree=k_stress, value_shape=())
P = fem.functionspace(mesh, P_element)
p = fem.Function(P, name="cumulative_plastic_strain")
dp = fem.Function(P, name="incremental_plastic_strain")
sigma_n = fem.Function(S, name="stress_n")
Defining the external operator#
During the automatic differentiation of the form \(F\), the following terms will appear in the Jacobian
where the “trial” part \(\boldsymbol{\varepsilon}(\boldsymbol{\hat{u}})\) will be handled by the framework and the derivative of the operator \(\frac{\mathrm{d} \boldsymbol{\sigma}}{\mathrm{d} \boldsymbol{\varepsilon}}\) must be implemented by the user. In this tutorial, we implement the derivative using the Numba package.
First of all, we implement the return-mapping procedure locally in the
function _kernel. It computes the values of the stress tensor, the tangent
stiffness matrix and the increment of cumulative plastic strain at a single
Gausse node. For more details, visit the original
implementation
of this problem for the legacy FEniCS 2019.
Then we iterate over each Gauss node and compute the quantities of interest
globally in the return_mapping function with the @numba.njit decorator.
This guarantees that the function will be compiled during its first call and
ordinary for-loops will be efficiently processed.
num_quadrature_points = P_element.dim
@numba.njit
def return_mapping(deps_, sigma_n_, p_):
"""Performs the return-mapping procedure."""
num_cells = deps_.shape[0]
C_tang_ = np.empty((num_cells, num_quadrature_points, 4, 4), dtype=PETSc.ScalarType)
sigma_ = np.empty_like(sigma_n_)
dp_ = np.empty_like(p_)
def _kernel(deps_local, sigma_n_local, p_local):
"""Performs the return-mapping procedure locally."""
sigma_elastic = sigma_n_local + C_elas @ deps_local
s = deviatoric @ sigma_elastic
sigma_eq = np.sqrt(3.0 / 2.0 * np.dot(s, s))
f_elastic = sigma_eq - sigma_0 - H * p_local
f_elastic_plus = (f_elastic + np.sqrt(f_elastic**2)) / 2.0
dp = f_elastic_plus / (3 * mu + H)
n_elas = s / sigma_eq * f_elastic_plus / f_elastic
beta = 3 * mu * dp / sigma_eq
sigma = sigma_elastic - beta * s
n_elas_matrix = np.outer(n_elas, n_elas)
C_tang = C_elas - 3 * mu * (3 * mu / (3 * mu + H) - beta) * n_elas_matrix - 2 * mu * beta * deviatoric
return C_tang, sigma, dp
for i in range(0, num_cells):
for j in range(0, num_quadrature_points):
C_tang_[i, j], sigma_[i, j], dp_[i, j] = _kernel(deps_[i, j], sigma_n_[i, j], p_[i, j])
return C_tang_, sigma_, dp_
Now nothing stops us from defining the implementation of the external operator
derivative (the stiffness tangent tensor \(\boldsymbol{C}_\text{tang}\)) in the
function C_tang_impl. It returns global values of the derivative, stress
tensor and the cumulative plastic increment.
def C_tang_impl(deps):
num_cells = deps.shape[0]
num_quadrature_points = int(deps.shape[1] / 4)
deps_ = deps.reshape((num_cells, num_quadrature_points, 4))
sigma_n_ = sigma_n.x.array.reshape((num_cells, num_quadrature_points, 4))
p_ = p.x.array.reshape((num_cells, num_quadrature_points))
C_tang_, sigma_, dp_ = return_mapping(deps_, sigma_n_, p_)
return C_tang_.reshape(-1), sigma_.reshape(-1), dp_.reshape(-1)
It is worth noting that at the time of the derivative evaluation, we compute the
values of the external operator as well. Thus, there is no need for a separate
implementation of the operator \(\boldsymbol{\sigma}\). We will reuse the output
of the C_tang_impl to update values of the external operator further in the
Newton loop.
def sigma_external(derivatives):
if derivatives == (1,):
return C_tang_impl
else:
return NotImplementedError
sigma.external_function = sigma_external
Note
The framework allows implementations of external operators and its derivatives
to return additional outputs. In our example, alongside with the values of the
derivative, the function C_tang_impl returns, the values of the stress tensor
and the cumulative plastic increment. Both additional outputs may be reused by
the user afterwards in the Newton loop.
Form manipulations#
As in the previous tutorials before solving the problem we need to perform some transformation of both linear and bilinear forms.
u_hat = ufl.TrialFunction(V)
J = ufl.derivative(F, Du, u_hat)
J_expanded = ufl.algorithms.expand_derivatives(J)
F_replaced, F_external_operators = replace_external_operators(F)
J_replaced, J_external_operators = replace_external_operators(J_expanded)
F_form = fem.form(F_replaced)
J_form = fem.form(J_replaced)
Note
We remind that in the code above we replace FEMExternalOperator objects by
their fem.Function representatives, the coefficients which are allocated
during the call of the FEMExternalOperator constructor. The access to these
coefficients may be carried out through the field ref_coefficient of an
FEMExternalOperator object. For example, the following code returns the
finite coefficient associated with the tangent matrix
C_tang = J_external_operators[0].ref_coefficient.
Variables initialization and compilation#
Before assembling the forms, we have to initialize the external operators. In particular, the tangent matrix should be equal to the elastic one during the first loading step, so to initialize the former, we evaluate external operators for a close-to-zero displacement field.
At the same time, we estimate the compilation overhead caused by the first call of JIT-ed Numba functions.
# We need to initialize `Du` with small values in order to avoid the division by
# zero error
eps = np.finfo(PETSc.ScalarType).eps
Du.x.array[:] = eps
timer = common.Timer("DOLFINx_timer")
timer.start()
evaluated_operands = evaluate_operands(F_external_operators)
_ = evaluate_external_operators(J_external_operators, evaluated_operands)
timer.stop()
pass_1 = timer.elapsed()[0]
timer.start()
evaluated_operands = evaluate_operands(F_external_operators)
_ = evaluate_external_operators(J_external_operators, evaluated_operands)
timer.stop()
pass_2 = timer.elapsed()[0]
print(f"\nNumba's JIT compilation overhead: {pass_1 - pass_2}")
Numba's JIT compilation overhead: 3.45
Solving the problem#
Solving the problem is carried out in a manually implemented Newton solver.
u = fem.Function(V, name="displacement")
du = fem.Function(V, name="Newton_correction")
external_operator_problem = LinearProblem(J_replaced, F_replaced, Du, bcs=bcs)
# Defining a cell containing (Ri, 0) point, where we calculate a value of u
# In order to run this program in parallel we need capture the process, to which
# this point is attached
x_point = np.array([[R_i, 0, 0]])
cells, points_on_process = find_cell_by_point(mesh, x_point)
q_lim = 2.0 / np.sqrt(3.0) * np.log(R_e / R_i) * sigma_0
num_increments = 20
max_iterations, relative_tolerance = 200, 1e-8
load_steps = (np.linspace(0, 1.1, num_increments, endpoint=True) ** 0.5)[1:]
loadings = q_lim * load_steps
results = np.zeros((num_increments, 2))
for i, loading_v in enumerate(loadings):
loading.value = loading_v
external_operator_problem.assemble_vector()
residual_0 = residual = external_operator_problem.b.norm()
Du.x.array[:] = 0.0
if MPI.COMM_WORLD.rank == 0:
print(f"\nresidual , {residual} \n increment: {i+1!s}, load = {loading.value}")
for iteration in range(0, max_iterations):
if residual / residual_0 < relative_tolerance:
break
external_operator_problem.assemble_matrix()
external_operator_problem.solve(du)
du.x.scatter_forward()
Du.vector.axpy(-1.0, du.vector)
Du.x.scatter_forward()
evaluated_operands = evaluate_operands(F_external_operators)
# Implementation of an external operator may return several outputs and
# not only its evaluation. For example, `C_tang_impl` returns a tuple of
# Numpy-arrays with values of `C_tang`, `sigma` and `dp`.
((_, sigma_new, dp_new),) = evaluate_external_operators(J_external_operators, evaluated_operands)
# In order to update the values of the external operator we may directly
# access them and avoid the call of
# `evaluate_external_operators(F_external_operators, evaluated_operands).`
sigma.ref_coefficient.x.array[:] = sigma_new
dp.x.array[:] = dp_new
external_operator_problem.assemble_vector()
residual = external_operator_problem.b.norm()
if MPI.COMM_WORLD.rank == 0:
print(f" it# {iteration} residual: {residual}")
u.vector.axpy(1.0, Du.vector)
u.x.scatter_forward()
# Taking into account the history of loading
p.vector.axpy(1.0, dp.vector)
# skip scatter forward, p is not ghosted.
sigma_n.x.array[:] = sigma.ref_coefficient.x.array
# skip scatter forward, sigma is not ghosted.
if len(points_on_process) > 0:
results[i + 1, :] = (-u.eval(points_on_process, cells)[0], loading.value / q_lim)
residual , 8.599242028001447
increment: 1, load = 18.22357591920427
it# 0 residual: 2.86659570639356e-13
residual , 3.561922674126921
increment: 2, load = 25.772028219874418
it# 0 residual: 1.1619299386056414e-13
residual , 2.7331593969517707
increment: 3, load = 31.564159387650495
it# 0 residual: 1.0946480970885102e-13
residual , 2.304159956922752
increment: 4, load = 36.44715183840854
it# 0 residual: 8.656123856986615e-14
residual , 2.030005673581492
increment: 5, load = 40.74915454846896
it# 0 residual: 8.168071528973626e-14
residual , 1.8352654137151767
increment: 6, load = 44.63846229092138
it# 0 residual: 7.192300232670426e-14
residual , 1.6877007264469919
increment: 7, load = 48.21504988051979
it# 0 residual: 7.085573696289195e-14
residual , 1.5708735345101743
increment: 8, load = 51.544056439748836
it# 0 residual: 6.593085701564125e-14
residual , 1.4753966797476157
increment: 9, load = 54.67072775761281
it# 0 residual: 6.515849416789851e-14
residual , 1.3954648755256611
increment: 10, load = 57.628007017682094
it# 0 residual: 6.730873016584998e-14
residual , 1.3272683288056422
increment: 11, load = 60.44076366255657
it# 0 residual: 6.544208278137888e-14
residual , 1.268188909824636
increment: 12, load = 63.12831877530099
it# 0 residual: 1.4893010071834571
it# 1 residual: 0.024011279690787098
it# 2 residual: 3.0594479646378868e-06
it# 3 residual: 8.303498067487531e-14
residual , 1.2163598639239093
increment: 13, load = 65.70603739900179
it# 0 residual: 0.8161940858616228
it# 1 residual: 0.07723280379263806
it# 2 residual: 9.315749140976803e-06
it# 3 residual: 4.413515811511117e-13
residual , 1.1704093926445502
increment: 14, load = 68.18637745152637
it# 0 residual: 0.8359673987800559
it# 1 residual: 0.013714168292272132
it# 2 residual: 1.815711060675932e-06
it# 3 residual: 6.968459024152898e-14
residual , 1.1293037097279741
increment: 15, load = 70.57960604342466
it# 0 residual: 1.6640529483784086
it# 1 residual: 0.821481976652028
it# 2 residual: 0.002415098137142869
it# 3 residual: 9.3096662838394e-08
it# 4 residual: 6.732687003196926e-14
residual , 1.0922469475492926
increment: 16, load = 72.89430367681707
it# 0 residual: 0.6400702322368389
it# 1 residual: 0.2833799350485556
it# 2 residual: 0.014196471902242862
it# 3 residual: 7.2922851684052155e-06
it# 4 residual: 3.821350105252596e-12
residual , 1.05861506969511
increment: 17, load = 75.13772839134165
it# 0 residual: 1.9811818203618505
it# 1 residual: 0.050114056098219645
it# 2 residual: 2.3347429368046748e-05
it# 3 residual: 1.3031864124389719e-11
residual , 1.0279109246863802
increment: 18, load = 77.31608465962326
it# 0 residual: 7.1610994372466035
it# 1 residual: 4.26585685457389
it# 2 residual: 0.6035764966419548
it# 3 residual: 0.00912868907030283
it# 4 residual: 1.957348242537754e-06
it# 5 residual: 5.314889461278251e-13
residual , 0.9997328847209843
increment: 19, load = 79.43472582175275
it# 0 residual: 1.6790196670813418
it# 1 residual: 0.022175619855480548
it# 2 residual: 3.371293463438318e-06
it# 3 residual: 8.554016782829364e-13
Post-processing#
results_interpolation = plasticity_von_mises_interpolation(verbose=False)
results_pure_ufl = plasticity_von_mises_pure_ufl(verbose=False)
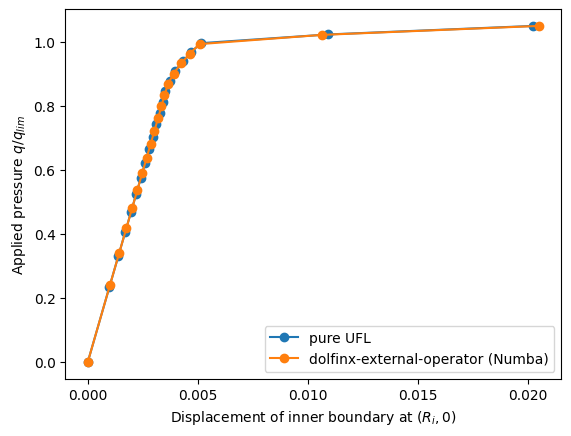
if len(points_on_process) > 0:
plt.plot(results_pure_ufl[:, 0], results_pure_ufl[:, 1], "-o", label="pure UFL")
plt.plot(results[:, 0], results[:, 1], "-o", label="dolfinx-external-operator (Numba)")
# plt.plot(-results_interpolation[:, 0], results_interpolation[:, 1], "-o", label="interpolation")
plt.xlabel(r"Displacement of inner boundary at $(R_i, 0)$")
plt.ylabel(r"Applied pressure $q/q_{lim}$")
plt.legend()
plt.show()
Marc Bonnet, Attilio Frangi, and Christian Rey. The finite element method in solid mechanics. McGraw Hill Education, 2014. URL: https://hal.science/hal-01083772.